 プログラミング
プログラミング 2023-02
プログラミング 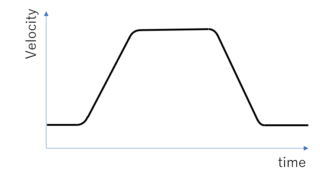 ロボット
ロボット ロボットの動作指令の作り方
ティーチング あらかじめロボットの動く位置と速度をティーチングします。ティーチングペンダントでロボットを操作し、動かしたい位置へ移動させて位置を記録します。そのときに速度の大きさも指定します。下図のようにP1とP2の2点間距離の500mmを...
 ロボット
ロボット ロボット各関節位置の求め方
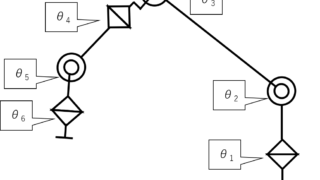
ロボットの手先位置姿勢から各関節角度を求めるのが、逆運動学である。下図の⓪の座標を基準にロボットの手先位置がX,Y,Z,Rx,Ry,Rzが分かっているときに各関節角度θ1~θ6がいくつになるか計算することになります。下図のように4軸、5軸、...
 ロボット
ロボット ロボット手先位置の求め方
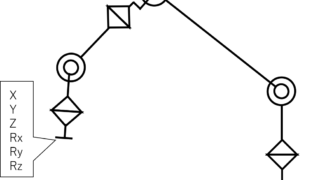
ロボットの手先位置を現在位置から目標位置へ移動させるには、各関節角度から手先位置をもとめる順運動学と手先位置から各関節角度を求める逆運動学を用いる必要があります。手先位置を前方に100mm、右に200mm、上に300mm移動させるときに、各...
 ロボット
ロボット ロボットの構成はどうなっている?
簡単に言うと、ロボットは、鉄の塊をモータで振り回して動いています。関節を6個持った形が主流です。その各関節には、アクチュエータが配置されており、関節同士はリンク(鉄の棒)で接続されています。アクチュエータとは、モータを含む駆動部分になります...
 ロボット
ロボット ロボットはどうやって動かす?
位置の記録 荷物を左から右で移動させる動作を作ることを考えてみましょう。ロボットコントローラに接続されたティーチングペンダントを使って、ロボットを操作します。 ティーチングペンダントにはいくつかのボタンが並んでいます。上下、左右、前後、とロ...