ロボット ロボット手先位置の求め方 ロボットの手先位置を現在位置から目標位置へ移動させるには、各関節角度から手先位置をもとめる順運動学と手先位置から各関節角度を求める逆運動学を用いる必要があります。手先位置を前方に100mm、右に200mm、上に300mm移動させるときに、各... 2023.02.07 ロボット
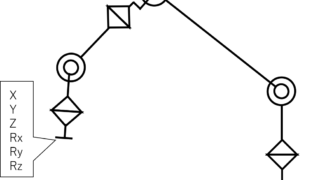
ロボット ロボットの構成はどうなっている? 簡単に言うと、ロボットは、鉄の塊をモータで振り回して動いています。関節を6個持った形が主流です。その各関節には、アクチュエータが配置されており、関節同士はリンク(鉄の棒)で接続されています。アクチュエータとは、モータを含む駆動部分になります... 2023.02.07 ロボット
 ロボット
ロボット 