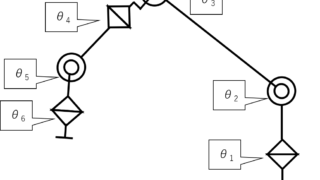
ロボット ロボット各関節位置の求め方 ロボットの手先位置姿勢から各関節角度を求めるのが、逆運動学である。下図の⓪の座標を基準にロボットの手先位置がX,Y,Z,Rx,Ry,Rzが分かっているときに各関節角度θ1~θ6がいくつになるか計算することになります。下図のように4軸、5軸、... 2023.02.08 ロボット
 ロボット
ロボット