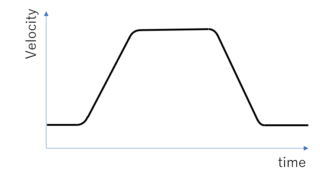
ロボット ロボットの動作指令の作り方 ティーチング あらかじめロボットの動く位置と速度をティーチングします。ティーチングペンダントでロボットを操作し、動かしたい位置へ移動させて位置を記録します。そのときに速度の大きさも指定します。下図のようにP1とP2の2点間距離の500mmを... 2023.02.12 ロボット
 ロボット
ロボット