位置の記録
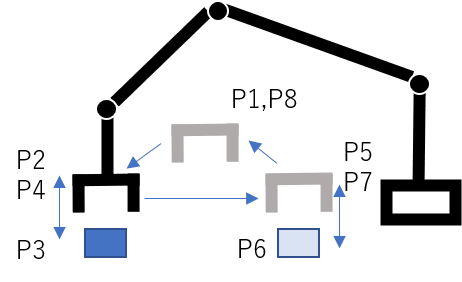
荷物を左から右で移動させる動作を作ることを考えてみましょう。
ロボットコントローラに接続されたティーチングペンダントを使って、ロボットを操作します。
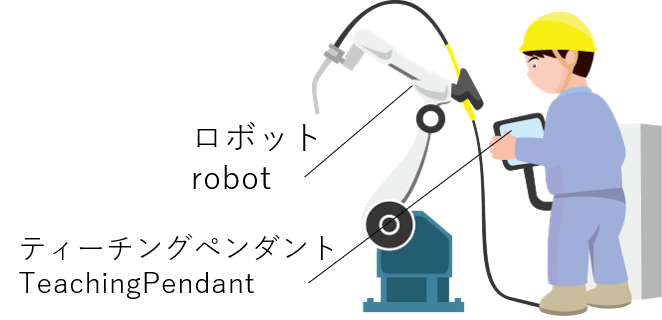
ティーチングペンダントにはいくつかのボタンが並んでいます。上下、左右、前後、とロボットの手先を移動させるボタン、移動位置を記録する記録ボタン、速度を設定する数値ボタンなどがあります。
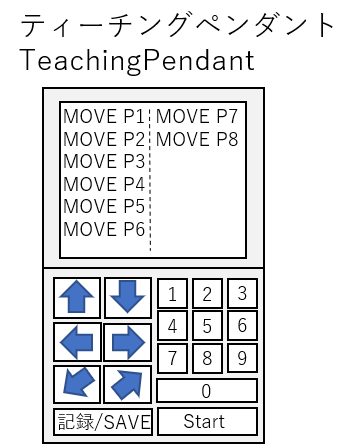
ボタンを押して操作し、以下の位置を記録します。記録の仕方は、移動ボタンでロボットの手先を移動させ、記録した位置に移動できたら記録ボタンを押して記録していきます。
- 初期位置へ移動
- 荷物の上空へ移動
- 荷物へアプローチ
- 持ち上げ
- 右に移動
- 荷物を置く
- 上空へ移動
- 初期位置へ戻る
ハンド開閉
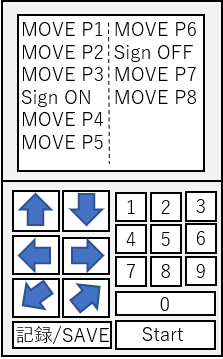
ハンドには、エアハンドと電磁弁を使うのが一般的です。エアハンドは2本のチューブから一方からエアーを送ると、ハンドが開き、もう一方からエアを送ると、ハンドが閉じる仕組みとなっています。電磁弁は、2本のどちらにエアーを供給するか切り替えるために使用します。電圧を印加することでコイルに電気が流れ、中の弁が切り替わり、エアーの通り道が変わります。P3の位置でハンドを閉めて荷物を持ちます。そのため、P3移動後に信号1をONさせます。同様にP6の位置でハンドを開いて荷物を置きますので、P6移動後に信号1をOFFにします。そうすると、以下のような動作プログラムが出来ます。
ティーチング動作の再生
ティーチングした動作プログラムをStartボタンで再生します。
教えた通りに、左から右に荷物を移動させるようにロボットは動作するはずです。

コメント
With havin so much content and articles do you ever run into any issues of plagorism or copyright violation? My site has a lot of unique content I’ve either written myself or outsourced but
it looks like a lot of it is popping it up all over the
internet without my permission. Do you know any ways
to help reduce content from being ripped
off? I’d really appreciate it.