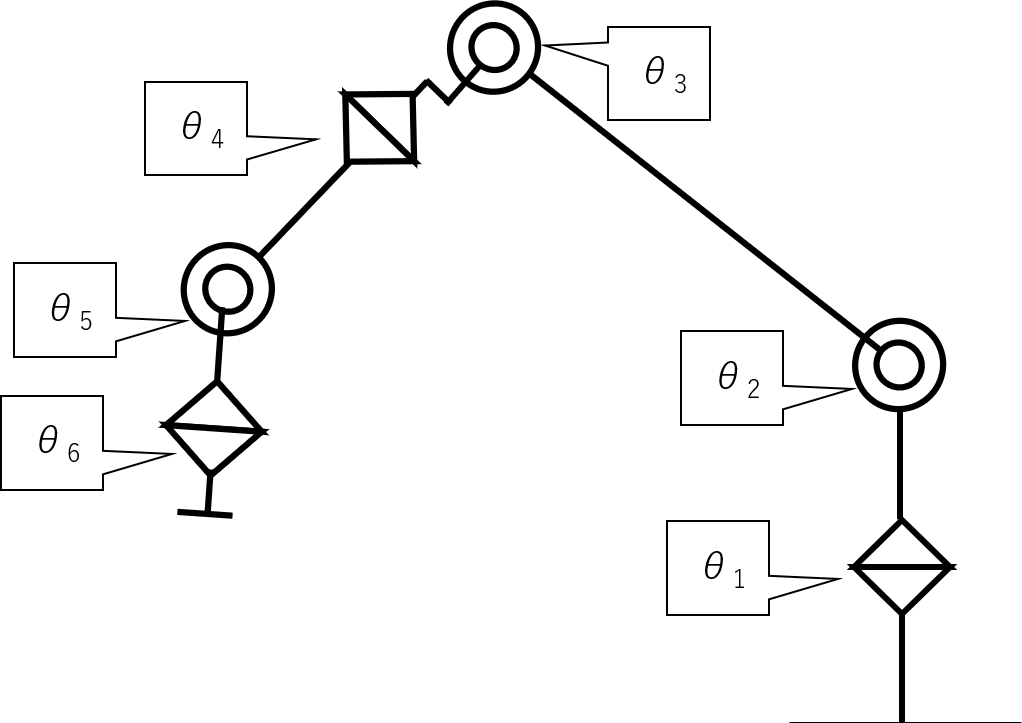
ロボットの手先位置姿勢から各関節角度を求めるのが、逆運動学である。下図の⓪の座標を基準にロボットの手先位置がX[mm],Y[mm],Z[mm],Rx[deg],Ry[deg],Rz[deg]が分かっているときに各関節角度θ1~θ6がいくつになるか計算することになります。下図のように4軸、5軸、6軸の回転軸がP点で交わっている場合、逆運動学が解きやすいとされている。産業用ロボットでは、その場合が多いです。

運動学の式を変形して解く方法
運動学では、下式で手先位置を求めた。0T6の4×4の行列が分かっている状態で各関節角度θ1~θ6を求めることになる。
0T6=0T11T22T33T44T55T6
上式を0T1を右辺から左辺に移行すると、下式になる。
(0T1)-1 0T6=1T22T33T44T55T6
また、上式を1T2を右辺から左辺に移行すると、下式になる。
(0T11T2)-1 0T6=2T33T44T55T6
このように、変形していきながら変数が少ない部分から解いていくと、θ1~θ6を求めることができる。
形態
ロボットの先端位置X,Y,Z,Rx,Ry,Rzが分かった状態でもθ1~θ6は一意に決まるわけではなく、複数の解を持つ。大抵は、移動中の前回位置に近い関節角度を取るようにする。もしくは、形態を指定して、教示する。形態とは、以下のパターン1~3が区別できるように指定する形を意味する。
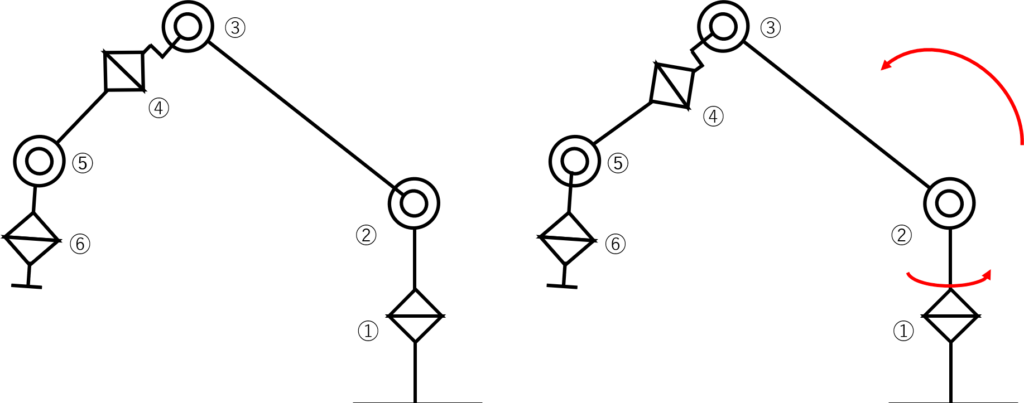
同じ位置姿勢のパターン1
関節①を180度回転させ、関節②、③、➄を回転させると、元と同じ位置姿勢にすることができる。
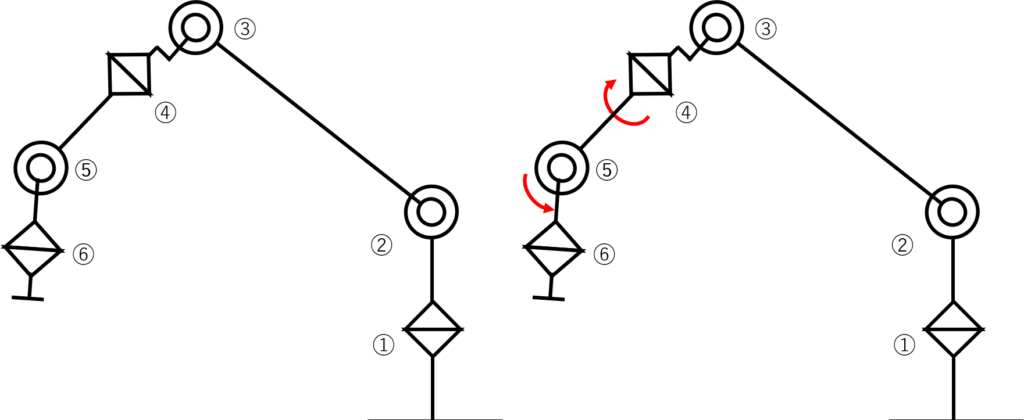
同じ位置姿勢のパターン2
関節④を180度回転させ、関節➄を回転させると、元と同じ位置姿勢にすることができる。
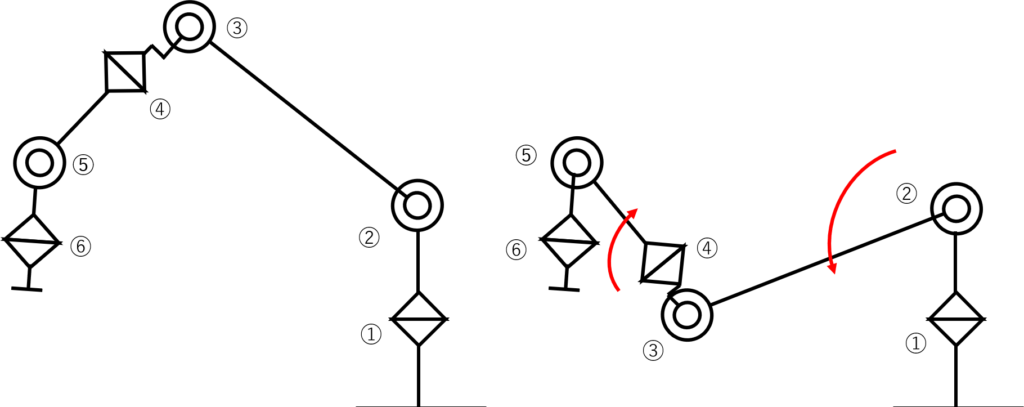
同じ位置姿勢のパターン3
関節②、③を回転させることで、元と同じ位置姿勢にすることができる。

コメント